Descrizione
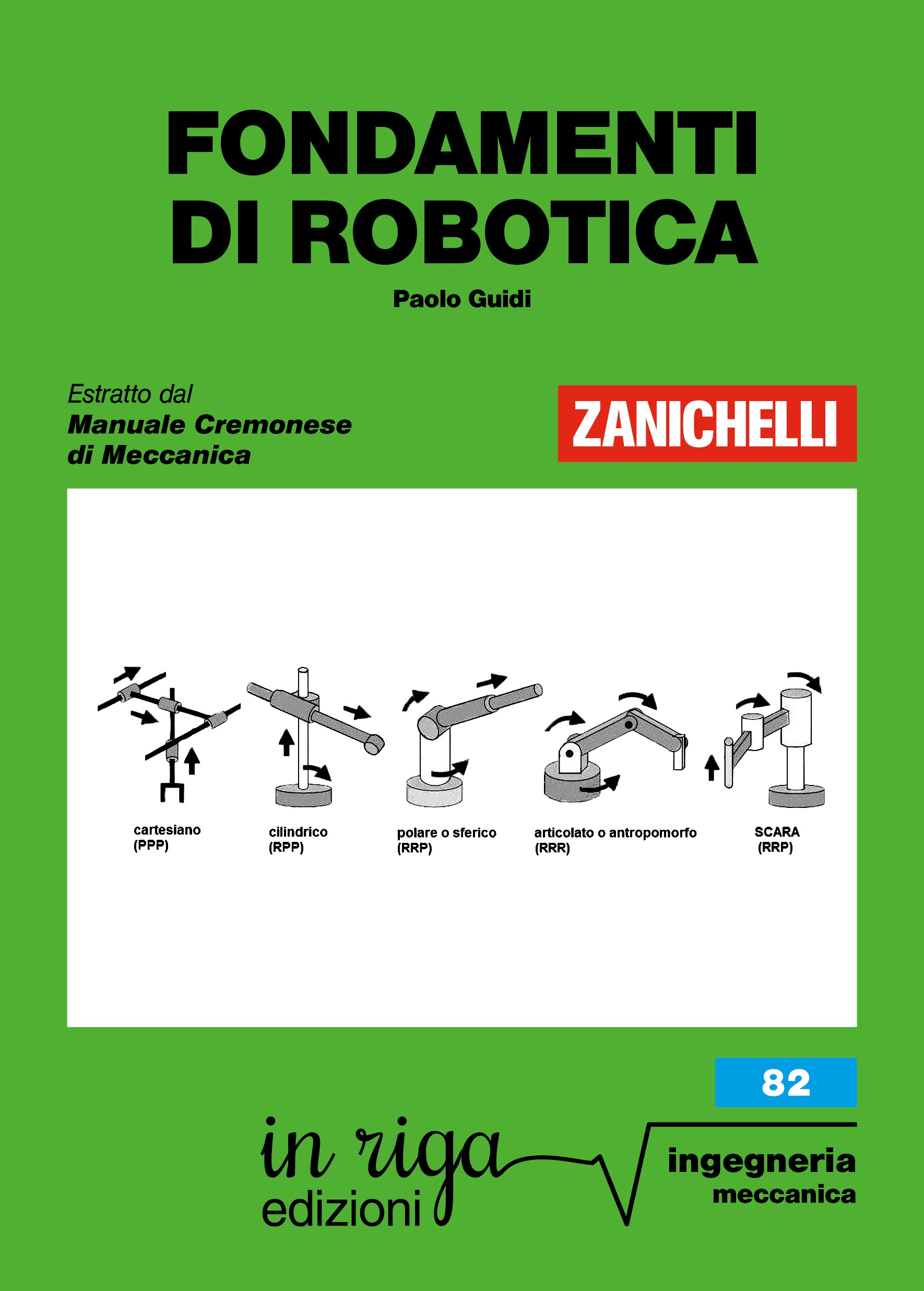
1. CONCETTI GENERALI – 1.1. Robot – 1.2. Robotica – 1.3. Applicazioni – 1.4. Robotica industriale • 2. SISTEMA MECCANICO – 2.1. Anatomia – 2.2. Meccanica dei robot – 2.3. Requisiti strutturali – 2.4. Manipolatori – 2.5. Robot mobili – 2.6. Studio del modello • 3. SISTEMA DI ATTUAZIONE – 3.1. Trasformazioni energetiche – 3.2. Tipi di azionamento – 3.3. Componenti • 4. SISTEMA SENSORIALE – 4.1. Funzioni tipiche – 4.2. Impiego dei sensori – 4.3. Sistemi di visione • 5. SISTEMA DI CONTROLLO – 5.1. Caratteristiche – 5.2. Struttura – 5.3. Tecniche di controllo – 5.4. Sicurezza • 6. PROGRAMMAZIONE – 6.1. Ambiente – 6.2. Criteri – 6.3. Tecniche – 6.4. Linguaggi • 7. ROBOT LEGO – 7.1. Concetti introduttivi – 7.2. Programmazione – 7.3. Esempio applicativo.
________